|
伺服电机及其驱动技术在我国还属于技术含量较高的领域,在机床、工业机器人、印刷机械、包装机械、塑料机械和纺织机械等行业得到广泛的应用。一个伺服系统的构成通常包含被控对象(plant)、执行器(actuator)、控制器(controller)等几个部分,机械手臂、机械工作平台通常作为被控对象。执行器的功能在于主要提供被控对象的动力,可能以气压、油压、或是电力驱动的方式呈现,若是采用油压驱动方式,一般称之为油压伺服系统。目前绝大多数的伺服系统采用电力驱动方式,执行器包含了电机与功率放大器,特别设计应用于伺服系统的电机称之为伺服电机(servo motor),通常内含位置反馈装置,如光电编码器(optical
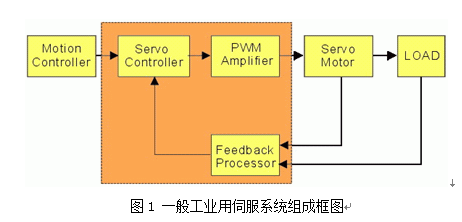
encoder)、解角器(resolver),目前主要应用于工业界的伺服电机包括直流伺服电机、永磁交流伺服电机、与感应交流伺服电机,其中又以永磁交流伺服电机占绝大多数。控制器的功能在于提供整个伺服系统的闭路控制,如扭矩控制、速度控制与位置控制等。目前一般工业用伺服驱动器(servo drive)通常包含了控制器与功率放大器。图1所示为一般工业用伺服系统组成框图。本文分析一般工业用伺服系统的伺服性能及阐述如何对一个既定的伺服系统进行调整,使之达到最佳的伺服性能。
一、伺服系统的性能分析
衡量一个伺服系统的性能主要从以下四个方面来分析:响应速度、刚度、稳定性以及抗噪音能力。
·响应速度
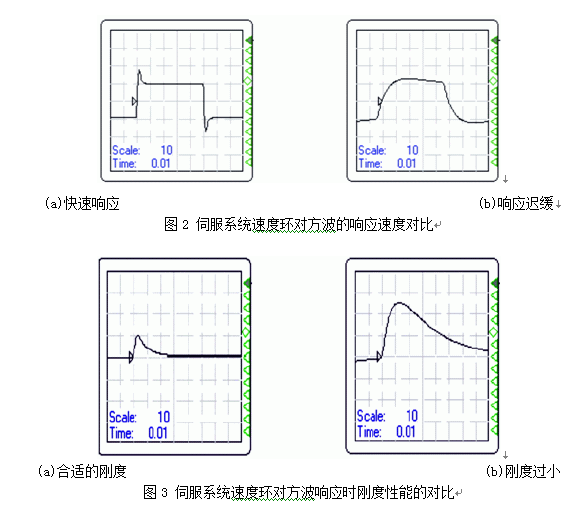
伺服系统的响应速度描述了系统响应指令给定的快慢程度,对大部分的伺服系统来说追求较快的响应速度,系统的增益越大,则响应速度快,有助于提高系统的性能;
·刚度
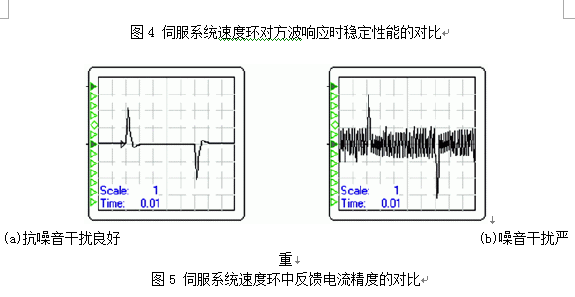
伺服系统的刚度描述了系统抗扭矩干扰的能力,系统的刚度比较难于衡量,这是由于系统的干扰往往难于量化,对于一个伺服系统来说,高的刚度能够达到较好的伺服性能;
·稳定性
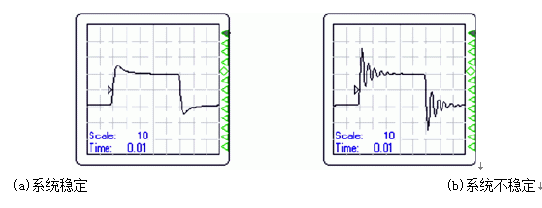
伺服系统的稳定性描述了系统消除自振荡的裕量,任何一个系统都必须有合适的稳定裕量,伺服系统的稳定性一般通过对方波信号响应的过冲量和振荡次数来衡量,伺服增益越高,系统的稳定性将降低;
·抗噪音能力
伺服系统的抗噪音能力描述了系统对噪音源的放大程度,噪音干扰会导致系统发热、振荡,扭矩波动和杂音等不良现象。伺服增益越高,系统的抗噪音能力将越低。图2~图5所示为伺服系统性能的对比分析。
二、伺服系统的调整过程研究
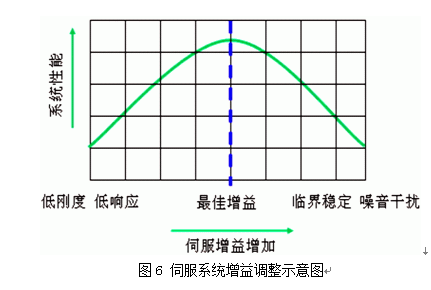
伺服系统的调整主要是系统的各项控制增益的调整,通过上述的分析,当增益调整较高时,可以使得系统具有较快的响应速度,提高系统的刚度从而提高系统抗扭矩干扰的能力。然而,另一个方面,过高的增益将使得系统的稳定性和抗噪音能力下降。因此,伺服系统的调整实际上是一个寻求系统各项性能的相互平衡并使整体性能最优的决策过程。本节中,以伺服系统速度环的调整为例,研究其调整过程,分析如何通过调整伺服系统的增益来最优化系统的响应速度、刚度、稳定性以及抗噪音能力,从而得到系统的最佳性能。图6所示为伺服系统增益调整示意图。
1. 伺服系统的速度环基本组成
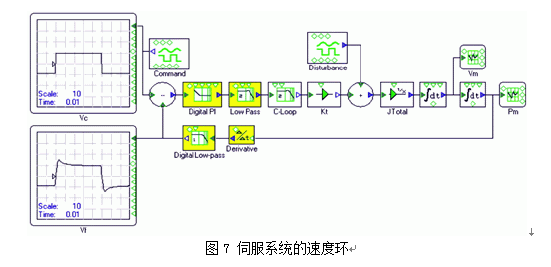
伺服系统的调整过程中,速度环是最难调整的,一般伺服系统的速度环如图7所示。速度指令来自于位置环,在调整过程中,通常以方波信号作为响应信号,这是由于方波信号的响应对系统要求最为严格。反馈速度与指令速度通过比较环节进行比较得到速度误差,一般来说速度环的控制作用就是为了减小这种误差。比例积分(PI)控制器中的比例增益通常是在高频时起作用,而积分增益通常是在中频时起作用,速度误差经过比例积分控制器后其输出为电流指令。伺服系统的电流环在研究速度环的时候,通常把它当作速度环的一个环节,它的作用就是把电流指令转换成实际电流,此时有可能引起系统的稳定性问题。
电机也作为速度环中的一个环节来研究,此时电机模型可以简化为KT/JTOTAL,其中KT把电流环输出的实际电流转换为扭矩信号,1/JTOTAL再把扭矩信号转换为系统的加速度信号。系统的加速度经过积分作用得到速度信号,速度信号再次经过积分环节得到系统的位置信号。系统的位置信号通过位置传感器来检测,系统的速度正比于系统位置的变化率。为了提高伺服系统的抗噪音能力以及稳定性,通常在系统中加入滤波器,如图7所示。
2. 伺服系统的调整过程研究
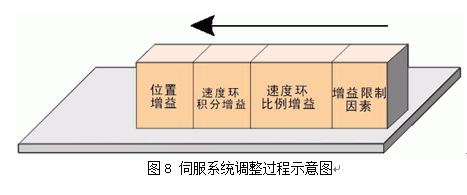
伺服系统的调整主要是针对闭环控制器的增益进行调整,使得整个系统达到一个最优的工作状态。其中速度环的调整是整个系统调整中最关键的,也是最难调整的。通常,增益的调整是一个一个地调整,首先了解伺服增益的限制因素,然后调整速度环的比例增益,接下来调整速度环的积分增益。对于每个增益参数的调整,都是从低慢慢地增加,确保系统稳定。
伺服系统比例增益的上限通常是由系统内部的各个部件本身决定的,驱动器本身的采样速率、滤波器特性、电流环特性甚至是接线产生的噪音,这些都可能成为限制比例增益的过高调整。同时伺服系统的反馈环节和机械传动部件也可能成为限制系统比例增益的重要因素。图8为伺服系统调整过程示意图,图9为系统调整试验装置。

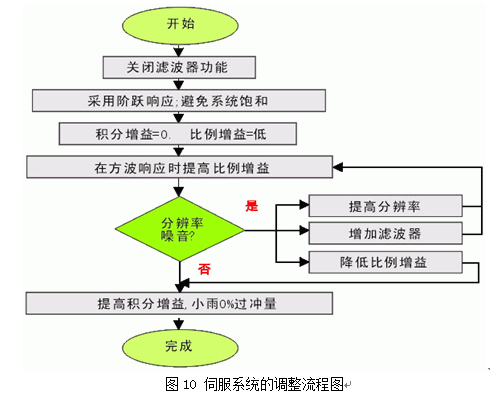
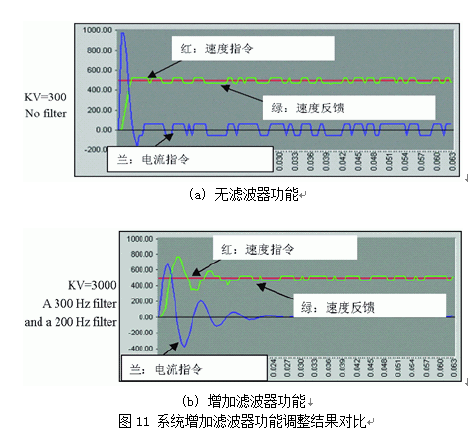
伺服系统的调整过程可以用如图10所示的流程图。事先假定系统伺服增益的限定因素是固定的,然后积分增益设为0,比例增益从低以20%的增量慢慢往上调整,同时监测系统的稳定性,当系统产生过冲,返回到上一个设置值。如果系统有噪音干扰,可以通过增加滤波器功能、提高反馈环节的分辨率或适当降低控制器的比例增益。增加滤波器功能有助于提高系统的抗噪音能力和响应能力,但是也同时给系统带来了时延的问题,而导致系统不稳定,因此只有在必要的情况下才增加滤波器功能。图11为系统增加滤波器功能调整结果。
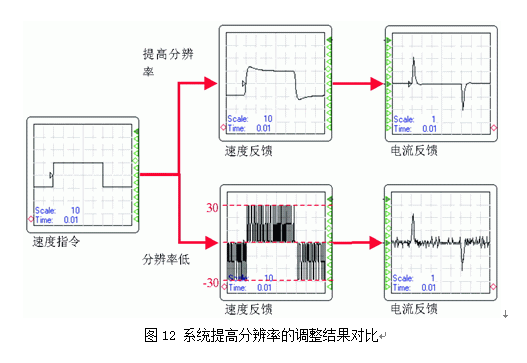
反馈环节的分辨率包括位置分辨率和速度分辨率,位置分辨率是位置传感器检测位置信号的最小增量值。速度分辨率可以表示为VRESOLUTION= PRESOLUTION /TSAMPLE。比如,一个伺服系统的位置传感器采用2000PPR的编码器,采样频率FSAMPLE为4kHz,则系统的位置分辨率为8000CPR,速度分辨率为30r/min。图12所示为系统提高分辨率的调整结果。
|
